▶什么是LiDAR360?
LiDAR360是一款由北京数字绿土科技股份有限公司自主研发的AI赋能的激光雷达与摄影测量数据处理软件,面向行业应用。它是一个综合性的点云数据处理和分析平台,能同时加载TB级的点云数据和处理超过300G的点云数据,拥有10余种先进的点云处理算法。支持8种数据类型,60+数据格式,全平台点云数据兼容。深耕业务十余年,行业用户广泛好评。
该平台包含丰富的点云处理和编辑工具能力,支持地形、林业、矿山、光谱和数字孪生等行业。LiDAR360提供了从原始点云数据到可交付产品(包括DEM、DSM、等高线、三维模型、树木调查和体积报告等)的统一工作流。
▶LiDAR360能处理大规模点云数据吗?
可以。LiDAR360专为大规模数据处理而构建:
- TB级数据加载:专利的优化格式支持TB级数据的快速加载和渲染
- 300G+同时处理:无需分割即可处理超大数据集
- 分布式计算:跨多台机器扩展处理能力,支持本地集群自动节点发现
- Model Builder:200多个处理模块可组合成自定义自动化工作流
- 批处理:在多个数据集上自动运行操作
- 命令行操作:脚本化和自动化分布式处理管道
▶LiDAR360支持哪些行业?主要服务于哪些用户?
LiDAR360通过专用模块服务于多个行业的专业人士:
| 行业 | 主要功能 | 典型用户 |
|---|---|---|
| 地形 / GIS | DEM、DSM、等高线生成、断面分析、坡度/坡向图 | 测绘工程师、GIS分析师 |
| 林业(ALS+TLS) | 单木分割、林分分析、回归分析、森林指标 | 林业调查员、碳汇评估师 |
| 矿山 | 堆体体积、露天矿边坡分析、井下巷道建模 | 矿山测量工程师 |
| 建筑 / 数字孪生 | 三维建筑建模(LOD2)、模型编辑 | 城市规划师、BIM工程师 |
| 光谱 | 113种光谱指数、SAM分类、MNF/PCA、USGS光谱库 | 遥感分析师、地质勘探员 |
| 地质 | 地形特征提取、结构面分析 | 地质灾害评估工程师 |
| 摄影测量 | 基于影像的三维重建、正射影像生成 | 无人机操作员、测量员 |
| 科研与学术 | 算法开发、空间数据分析 | 研究员、高校师生 |
▶LiDAR360 与 CAD / GIS / DJI Terra / Pix4D / BIM 软件是什么关系?
LiDAR360与这些专业软件是互补协作关系,而非替代:
- CAD(AutoCAD / Civil 3D):LiDAR360完成点云分类和DEM/等高线生成,导出DXF到CAD进行工程详图设计
- GIS(ArcGIS / QGIS):LiDAR360负责点云深度处理,导出GeoTIFF/SHP到GIS进行空间分析和专题制图
- DJI Terra / Pix4D:摄影测量软件生成点云和正射影像,LiDAR360进行深度加工(分类、林业分析、矿山计算等)
- BIM(Revit / SketchUp):LiDAR360从点云自动生成LOD2建筑模型,导出OBJ到BIM软件进行深化设计
详细协同说明请参见本FAQ的「与 CAD/GIS/摄影测量/BIM 协同」模块。
▶LiDAR360的硬件及系统要求是什么?
- 操作系统:Microsoft Windows 7/8/10/11(64位),Windows Server 2012及以上
- 内存:至少32 GB
- CPU:Intel Core i5/i7双核处理器或更高
- GPU:NVIDIA显卡GTX 970及以上,显存至少4 GB
- OpenGL:4.6或更高版本(用于着色器渲染、Mesh编辑器和建筑模型显示)
- 显示:推荐使用高性能图形模式。确保安装最新NVIDIA驱动,并在Windows图形设置中启用高性能模式。
LiDAR360支持Windows Server,使用管理员账户安装和激活,并确保软件安装在所有用户均可访问的文件夹中。
▶如何查看帮助手册?
点击F1按钮或点击软件界面右上角的 帮助 按钮即可访问内置帮助手册。
▶LiDAR360支持哪些国家和地区的语言?
该软件共支持 12 种语言,对应以下国家和地区:
| 语言(原文) | 对应语言名称 | 主要使用国家和地区 |
|---|---|---|
| 中文 | 简体中文 | 中国、新加坡 |
| English | 英语 | 美国、英国、澳大利亚、加拿大等 |
| German | 德语 | 德国、奥地利、瑞士 |
| 繁體中文 | 繁体中文 | 中国香港、中国台湾、中国澳门 |
| Italian | 意大利语 | 意大利、瑞士 |
| Русский Язык | 俄语 | 俄罗斯、白俄罗斯、哈萨克斯坦等 |
| Polski | 波兰语 | 波兰 |
| Francais | 法语 | 法国、加拿大(魁北克)、比利时、瑞士 |
| Turkce | 土耳其语 | 土耳其、北塞浦路斯 |
| 日本語 | 日语 | 日本 |
| 한국어 | 韩语 | 韩国、朝鲜 |
| Espanol | 西班牙语 | 西班牙、墨西哥、阿根廷、哥伦比亚等 |
▶如何查看软件版本?
点击"文件 > 关于"查看版本信息。格式为"版本号.构建日期"(例如,9.1.0为软件版本,"2026年1月30日"为构建日期)。
▶如何试用、下载样例数据或申请演示?
免费试用:访问"数字绿土"官网 www.lidar360.com,导航至 软件产品 > LiDAR360 > 试用申请,填写试用申请表。或关注"数字绿土"公众号,点击"线上互动" > "软件试用"填写申请。工作人员将把软件安装包和激活码发送到您的邮箱。
样例数据:访问官网 软件产品 > LiDAR360 > 样例数据,可自行下载样例数据集进行测试。
产品演示:联系 info@lidar360.com 申请产品演示,工程师将展示与您项目需求相关的LiDAR360工作流。
▶1. LiDAR360 和 AutoCAD / Civil 3D 有什么区别?能一起使用吗?
LiDAR360与AutoCAD/Civil 3D是互补配合的关系,两者定位不同、各有所长。CAD软件擅长二维图纸绘制、三维实体建模和工程详图设计,但在处理海量激光雷达点云数据方面存在天然局限;LiDAR360则专注于点云的智能化处理和专业分析。
LiDAR360能做而CAD难以完成的工作:
| 能力 | LiDAR360 | CAD软件(AutoCAD/Civil 3D) |
|---|---|---|
| 点云处理规模 | 300G+单文件,TB级项目 | 点云加载受限,大文件性能急剧下降 |
| AI自动分类 | 26种AI分类类别、深度学习模型、自定义训练 | 无AI分类能力,需手动分层 |
| 地面点自动分类 | IPTD算法,复杂地形高精度自动分类 | 无自动地面滤波,依赖手动操作 |
| 林业分析 | 单木分割、18+树木属性、生物量估算、回归分析 | 不支持 |
| 矿山分析 | 堆体体积、露天矿边坡、巷道建模、变形监测 | 仅基础体积计算 |
| 光谱分析 | 113种光谱指数、SAM分类、点云光谱映射 | 不支持 |
| 自动化工作流 | Model Builder(200+模块)、批处理、分布式计算 | 有限的脚本/宏 |
典型配合方式:
1. 使用LiDAR360完成点云分类、DEM生成、等高线提取和三维建模
2. 将处理结果导出为DXF格式,在AutoCAD/Civil 3D中进行工程详图设计、标注和出图
3. LiDAR360作为"点云到设计成果"的前端处理引擎,CAD完成最终工程交付
总结:LiDAR360填补了CAD软件在点云智能处理方面的空白,两者串联使用可形成完整的"数据采集→点云处理→工程详图"生产管线。
▶2. LiDAR360 和 ArcGIS / QGIS 有什么区别?能一起使用吗?
LiDAR360与ArcGIS/QGIS同样是互补配合的关系。GIS平台擅长空间数据管理、地图制图、网络分析和地理统计,而LiDAR360专注于三维点云深度处理和AI驱动分析,两者可以无缝衔接。
LiDAR360能做而GIS难以完成的工作:
| 能力 | LiDAR360 | GIS软件(ArcGIS/QGIS) |
|---|---|---|
| 三维点云原生处理 | 完整的3D点云编辑、剖面编辑、TIN编辑 | 点云为附属格式,编辑能力有限 |
| AI深度学习分类 | 26种预训练类别、自定义深度学习模型训练 | 有限的机器学习分类,无深度学习点云分类 |
| 林业分析(ALS+TLS) | CHM/点云分割、18+树木属性、70种树种模型、回归分析 | 基础栅格分析,无单木级能力 |
| 地基LiDAR(TLS) | 胸径批量提取、树干检测、TLS分割 | 不支持 |
| 航带拼接 | 自动/手动航带平差、安置误差校正 | 不支持 |
| 建筑三维建模 | 自动LOD2建筑模型、纹理映射、模型编辑 | 仅二维建筑足迹 |
| 矿山巷道建模 | 井下巷道三维模型、断面分析 | 不支持 |
| 光谱点云融合 | 影像光谱→点云映射、联合空间-光谱分类 | 仅栅格光谱分析 |
| Model Builder | 200+模块可视化拖拽自动化 | 有限的ModelBuilder/Graphical Modeler |
典型配合方式:
1. LiDAR360处理原始点云,生成DEM、DSM、等高线、建筑模型等产品
2. 导出GeoTIFF/SHP到ArcGIS/QGIS进行空间分析、叠加分析和专题制图
3. 林业场景:LiDAR360完成单木分割和属性提取,导出SHP到GIS进行空间分布分析和报告制图
总结:LiDAR360是强大的"点云数据处理引擎",GIS是"空间数据管理与分析平台",两者各司其职、无缝衔接。
▶3. LiDAR360如何与CAD/GIS工作流集成?
LiDAR360通过开放的行业标准格式实现与CAD/GIS平台的无缝集成。典型端到端工作流如下:
数据流转示意:

格式与目标平台对照:
| 导出格式 | 数据类型 | 目标平台 | 典型用途 |
|---|---|---|---|
| DXF(*.dxf) | 矢量(等高线、建筑轮廓) | AutoCAD、Civil 3D、MicroStation | 工程详图、施工图设计 |
| Shapefile(*.shp) | 矢量(树木位置、建筑边界) | ArcGIS、QGIS、SuperMap | 空间分析、专题制图 |
| GeoTIFF(*.tif) | 栅格(DEM、DSM、DOM) | ArcGIS、QGIS、Civil 3D | 地形分析、表面建模 |
| CSV(*.csv) | 表格(树木属性、点坐标) | Excel、ArcGIS、QGIS | 统计分析、属性关联 |
| LAS/LAZ(*.las) | 分类点云 | ArcGIS Pro、CloudCompare | 进一步点云分析 |
反向数据流:
LiDAR360也支持从GIS导入数据:
- 导入SHP作为裁剪边界、分类训练样本或分析范围
- 导入GeoTIFF作为参考栅格或分析底图
总结:LiDAR360与CAD/GIS之间通过标准化格式实现双向数据交换,用户可根据项目需求灵活编排处理流程。
▶4. LiDAR360如何与摄影测量和无人机数据处理工具协同工作?
LiDAR360与摄影测量软件形成前后端互补关系。摄影测量工具(如DJI Terra、Pix4Dmapper、ContextCapture、Metashape)从影像生成点云和正射影像,LiDAR360则对点云进行深度加工和专业分析。
协同工作模式:
| 阶段 | 工具 | 产出 |
|---|---|---|
| 数据采集 | 无人机搭载LiDAR/相机 | 原始点云、影像 |
| 影像预处理 | DJI Terra / Pix4Dmapper / Metashape | 密集点云、正射影像、DSM |
| 深度处理 | LiDAR360 | 分类点云、DEM、等高线、林业/矿山产品 |
| 专业分析 | ArcGIS / QGIS | 空间分析、专题制图 |
具体协同场景:
场景一 — DJI Zenmuse L1/L2/L3数据:
LiDAR360内置DJI L1/L2重建工具,可直接处理DJI原始LiDAR数据,无需通过大疆智图。对于同时采集的影像数据,可通过大疆智图生成正射影像,再导入LiDAR360与点云融合进行彩色显示和分类。
场景二 — 影像+LiDAR融合:
1. 使用摄影测量软件(Pix4Dmapper/Metashape)从影像生成密集点云和正射影像
2. 将点云和正射影像导入LiDAR360
3. LiDAR360融合二者进行:联合分类、光谱→点云映射、彩色点云增强显示
4. 生成最终DEM/DSM/等高线产品
场景三 — LiDAR360内置摄影测量模块:
LiDAR360的Photo模块本身支持从下视和倾斜影像进行三维重建、真正射影像生成和密集点云生成,可在单一平台内完成"影像+LiDAR"全流程处理。
总结:LiDAR360既能独立完成摄影测量处理,也能与第三方摄影测量工具配合,形成灵活的多源数据处理方案。
▶5. LiDAR360如何补充三维建模和BIM工具?
LiDAR360承担"现实捕捉到设计模型"的桥梁角色。三维建模/BIM软件(Revit、SketchUp、3ds Max、Rhino)擅长参数化建模和设计,但在从海量点云自动提取建筑几何方面能力有限。
LiDAR360为BIM/建模工作流提供的独特价值:
| 能力 | LiDAR360 | BIM/建模软件 |
|---|---|---|
| 建筑点云自动分类 | AI+深度学习自动识别建筑点 | 手动圈选建筑点,效率低 |
| LOD2自动建模 | 从机载点云一键生成LOD2模型 | 需手动描边建模 |
| 大规模场景处理 | 全城区一次性处理 | 按地块分批,拼接困难 |
| 多源数据融合 | 点云+影像+矢量融合建模 | 有限的多源支持 |
| 地形+建筑一体 | 同时生成DEM+建筑模型,坐标统一 | 需手动对齐 |
典型BIM工作流:
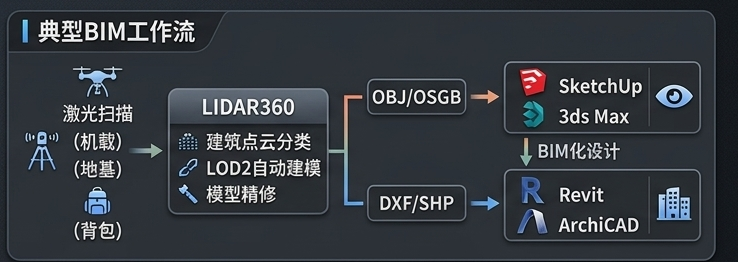
总结:LiDAR360实现从"点云→智能分类→自动建模"的自动化转换,将建筑几何信息高效传递到BIM/建模软件进行深化设计和渲染。它解决的是"如何从现实世界快速获取准确的三维基础模型"这一BIM流程的核心瓶颈。
▶6. LiDAR360支持哪些数据交换格式,如何实现跨平台互操作?
LiDAR360遵循"所有成果可导出为开放标准格式"的原则,确保与各类专业软件的无障碍互通。
导出格式总览:
| 类别 | 格式 | 用途 | 目标软件 |
|---|---|---|---|
| 点云 | LAS、LAZ | 行业标准LiDAR交换格式 | ArcGIS Pro、CloudCompare、Global Mapper |
| 点云 | E57 | ASTM三维成像标准 | Recap、Cyclone、Scene |
| 点云 | PLY、PCD | 通用三维点云格式 | MeshLab、CloudCompare、Python(Open3D) |
| 点云 | ASCII(TXT、XYZ、CSV) | 纯文本点坐标 | 任何支持文本导入的软件 |
| 栅格 | GeoTIFF(*.tif) | 地理参考栅格(DEM/DSM/DOM) | ArcGIS、QGIS、ENVI、Civil 3D |
| 栅格 | JPEG(*.jpg) | 正射影像快视图 | 通用 |
| 矢量 | Shapefile(*.shp) | GIS行业标准矢量 | ArcGIS、QGIS、SuperMap |
| 矢量 | DXF(*.dxf) | CAD行业标准交换格式 | AutoCAD、Civil 3D、MicroStation |
| 表格 | CSV(*.csv) | 属性数据和统计结果 | Excel、Python、R |
| 三维模型 | LiModel(*.LiModel) | 专有模型格式(可编辑) | LiDAR360内部 |
| 三维模型 | LiTin(*.LiTin) | 专有TIN格式(可编辑) | LiDAR360内部 |
| 三维模型 | OBJ(*.obj) | 通用三维模型格式 | SketchUp、3ds Max、Revit、Blender |
| 三维模型 | OSGB(*.osgb、*.ive) | 倾斜摄影模型格式 | SuperMap、Cesium |
输入格式同理:LiDAR360支持读取60+种数据格式,包括LAS、LAZ、E57、PLY、PCD、ASCII点云、GeoTIFF/JPEG栅格、SHP矢量、OBJ/OSGB模型等。
互操作设计原则:
- 所有分析结果均可导出,不锁死在专有格式中
- 专有格式(LiData、LiModel、LiTin)用于性能和编辑,但始终提供开放格式导出途径
- 支持地理坐标系统和投影信息在整个工作流中保持和传递
总结:LiDAR360作为开放的数据处理平台,通过全面支持行业标准格式,确保用户可自由选择下游工具链,不被单一软件绑定。
▶7. LiDAR360 的典型端到端工作流是什么?
示例一:地形测绘(LiDAR360 + AutoCAD Civil 3D)

示例二:森林资源调查(LiDAR360 + ArcGIS)
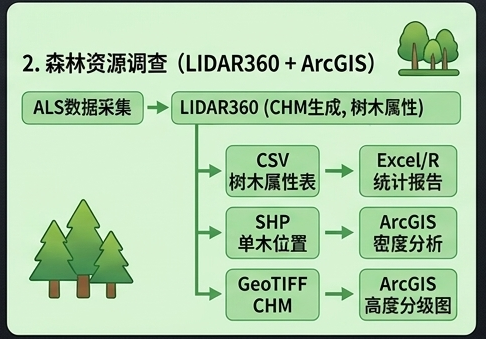
以下通过两个典型应用场景展示LiDAR360的端到端工作流,说明其作为"点云数据→专业产品的智能转换中枢"如何与下游软件高效协作:
▶8. LiDAR360如何与AutoCAD、ArcGIS、Civil 3D和QGIS协同工作?
LiDAR360以兼容主流CAD和GIS平台的格式导出成果:
- AutoCAD / Civil 3D:矢量数据导出为DXF(*.dxf)用于CAD工作流。等高线、建筑轮廓和测量报告可直接以CAD格式交付。
- ArcGIS / QGIS:栅格产品导出为GeoTIFF(*.tif),包括DEM、DSM和正射影像。矢量数据导出为Shapefile(*.shp)用于GIS集成。CSV表格导出也支持属性数据。
- 跨平台工作流:LiDAR360可导入SHP文件作为裁剪边界或训练数据,并将结果导出回SHP以供进一步GIS分析。
▶1. LiDAR360支持哪些数据格式和输出哪些成果?
点云:
- LAS / LAZ(*.las、*.laz)
- E57(*.e57)
- PLY(*.ply)
- PCD(*.pcd)
- LiData(专有优化格式)
- ASCII(*.txt、*.asc、*.neu、*.xyz、*.pts、*.csv)
栅格:
- GeoTIFF / 影像(*.tif、*.tiff、*.jpeg、*.jpg、*.bmp、*.dat、*.img、*.hdr)
矢量:
- 矢量(*.shp、*.dxf、*.kml、*.gpkg)
模型:
- LiModel(专有格式)
- LiTin(专有格式)
- LiBIM(专有格式)
- LiTree(专有格式)
- OSG(*.osgb、*.ive、*.desc)
- OBJ(*.obj)
- 3D tiles(*.tileset.json*、*.2dtin.json、*.3dtin.json、*.json)
轨迹:
- OSG(*.osgb、*.ive、*.desc)
- Trajectory(*.traj)
- OUT(*.out)
- POS(*.pos)
- TXT(*.txt)
倾斜影像:
- LiDAR360影像工程文件(*.liaep)
- LiGeoreference工程文件(*.ligeo)
- Pix4d文件(*.p4d)
- Block Exchange XML文件(*.xml)
- 表格:csv、treedb
- 全景影像:imglist、lipano
可输出的成果:
| 成果类型 | 格式 | 典型用途 |
|---|---|---|
| DEM / DSM / DOM /山体阴影/水淹分析等19种栅格成果 | GeoTIFF | 地形分析、正射底图 |
| 等高线等矢量成果 | DXF、SHP等 | CAD/GIS工程交付 |
| 分类等点云成果 | LAS、LAZ、LiData等 | 下游分析与归档 |
| 三维模型 | LiModel、OBJ、OSG 等 | 数字孪生、BIM |
| 单木属性 | CSV、SHP等 | 林业调查、碳汇核算 |
| 单木/体积/断面等各种报告 | CSV、HTML、PDF | 矿山验收、工程审计 |
| 光谱指数等光谱栅格成果 | GeoTIFF | 植被、矿物、水体分析 |
所有成果均可以开放标准格式导出,确保与AutoCAD、ArcGIS、QGIS、Civil 3D等第三方平台无缝对接。
▶2. LiDAR360能处理DJI 禅思(Zenmuse) L1/L2/L3数据吗?
可以。LiDAR360完全支持DJI Zenmuse L1、L2和L3数据。完整处理流程如下:
第一步 — DJI L1/L2重建(推荐用于DJI原始数据):
LiDAR360为DJI Zenmuse L1和L2原始LiDAR数据提供了专用的重建工具。该端到端功能将原始数据处理为可下游分析使用的分类点云。
1. 点击"预处理 > DJI L1/L2重建"
2. 选择包含原始L1/L2 LiDAR数据的工程目录
3. 配置点云处理选项:
- 精度优化:使用ICP算法优化点云精度
- 平滑:应用点云平滑处理
- 赋色:为点云数据赋予颜色
- 滤除超出距离的点:设置最大有效距离,超出该范围的点被裁切
4. 选择输出坐标系(未指定则由算法自动确定)
5. 选择输出点云格式:LAS、PLY、PNTS、PCD、S3MB
6. 可选启用点云合并为单个文件
7. 在认证配置中输入大疆智图授权的App Key和Secret Key
8. 设置输出路径并运行
第二步 — 手动航带平差工作流:
1. 轨迹加载与GPS时间转换:加载轨迹文件。轨迹时间基准可能与点云GPS时间基准不同(如GPS周/秒与调整后的GPS时间)。
- 点击"预处理 > 航带平差"
- 输入轨迹文件
- 在GPS时间转换与坐标系选择对话框中勾选"GPS时间转换"
- 选择源GPS时间格式和目标格式
- 选择数据采集日期以对齐轨迹时间与点云时间
- 选择适合数据的坐标系
2. 航带拼接:轨迹加载后,使用航带拼接工具校正激光扫描仪与GPS/INS系统之间的安置误差。提供手动和自动两种拼接方法,实时显示结果。
3. 坐标投影(如需):若数据使用地理坐标,转换为投影坐标:
- 点击"数据管理 > 点云工具 > GPS时间转换"(用于LiData格式的GPS标准时间与GPS周秒之间的转换)
- 使用"数据管理 > 定义投影"或"重投影"设置正确的坐标系
▶3. LiDAR360 支持哪些激光雷达设备采集的数据?
LiDAR360 可用于处理无人机激光雷达、手持激光雷达、车载移动测量、背包式扫描、地基激光扫描等多平台采集的点云数据。具体支持的设备分为数字绿土自有硬件生态和第三方激光雷达设备两大类:
一、数字绿土自有硬件生态
| 设备类别 | 系列/系统 | 代表型号 |
|---|---|---|
| 无人机激光雷达扫描系统 | LiAir 系列 | LiAir H600 Pro、LiAir H600、LiAir H800、LiAir X4 Plus、LiAir 250 Pro |
| 手持扫描系统 | LiGrip 系列 | LiGrip O2、LiGrip SE |
| 车载移动激光扫描系统 | LiMobile 系列 | LiMobile M2 系列 |
| 背包激光雷达扫描系统 | LiBackpack 系列 | LiBackpack DGC50H |
二、第三方激光雷达设备
| 品牌/设备 | 处理说明 |
|---|---|
| DJI Zenmuse L1 / L2 | 支持在 LiDAR360 中一键解算处理,内置 DJI L1/L2 重建工具 |
| DJI Zenmuse L3 | 将在 9.1.2 版本后支持 |
| RIEGL | 需使用配套软件(如 RiPROCESS)生成标准点云后导入 |
| Leica | 需使用 Leica 自有解算流程生成标准点云后导入 |
| Trimble | 需使用 Trimble 软件生成标准点云后导入 |
| FARO | 需使用 FARO Scene 等软件生成标准点云后导入 |
| Velodyne | 需使用 Velodyne 配套驱动或第三方工具生成标准点云 |
| Ouster | 需使用 Ouster SDK 生成标准点云后导入 |
| Hesai | 需使用 Pandar 系列配套工具生成标准点云 |
| Livox | 需使用 Livox Viewer 等工具生成标准点云后导入 |
> 说明: 目前表中仅列出了部分常用第三方设备,未列出的不代表不支持。LiDAR360 对各类激光雷达设备的数据始终保持开放兼容的态度,只要设备可输出标准点云格式(LAS/LAZ/PLY/E57/ASCII 等),即可导入 LiDAR360 进行后续处理与分析。如果您有针对特定厂商数据的一键解算需求,欢迎将设备型号和数据样例反馈至 info@lidar360.com,我们会持续扩展设备兼容性与数据支持。
▶4. LiDAR360 如何融合点云、影像、栅格、矢量和三维模型数据?
LiDAR360具备业界领先的多源数据融合能力,能够在单一平台内同时加载、融合和分析多种类型的地理空间数据。这种"一站式"多源融合架构是LiDAR360区别于其他点云处理软件的核心优势之一。
LiDAR + 影像融合(正射影像 / 多光谱 / 高光谱):
| 融合方式 | 输入数据 | 融合效果 | 应用场景 |
|---|---|---|---|
| 点云赋色 | LiDAR点云 + RGB正射影像 | 点云获得真实色彩,增强可视化效果 | 三维浏览、成果展示 |
| 光谱点云映射 | LiDAR点云 + 多光谱/高光谱影像 | 每个激光点携带光谱波段值,支持直接在点云上计算光谱指数 | 植被分类、树种识别、矿物填图 |
| 联合空间-光谱分类 | 分类点云 + 光谱影像 | 结合三维几何特征与光谱特征,分类精度显著提升 | 精细土地覆盖分类、建筑物提取 |
| 正射影像融合 | LiDAR点云 + DOM | 点云与正射影像叠加显示与对比分析 | 变化检测、精度验证 |
LiDAR + 栅格融合(DEM / DSM / 地形产品):
- 导入外部DEM/DSM与点云叠加,进行精度对比分析和误差评估
- 将LiDAR360生成的DEM与外部水文模型、土壤数据等栅格叠加进行联合空间分析
- 支持多时相栅格产品对比,用于监测地表形变、侵蚀和沉积变化
- 栅格产品作为底图辅助点云分类和编辑时的参考判读
LiDAR + 矢量融合(SHP / DXF / KML / GPKG):
- 导入SHP矢量作为裁剪边界,精确控制处理和分析范围
- 导入标注好的矢量多边形作为AI分类/机器学习的训练样本
- 导入已有的建筑基底、道路中心线等矢量数据辅助三维建模
- 分析结果导出回矢量格式,实现与CAD/GIS平台的双向无缝流转
LiDAR + 三维模型融合(OBJ / OSGB / BIM / 3D Tiles):
- 导入倾斜摄影三维模型(OSGB/OBJ)与点云叠加对比,评估建模精度
- 将LiDAR360生成的LOD2建筑模型与城市倾斜模型融合,构建完整数字孪生场景
- 导入BIM设计模型与实测点云对比,进行施工偏差分析和竣工验证
- 导入3D Tiles格式数据,实现Web端大规模三维场景发布
LiDAR360多源融合的独特优势:
- 单平台全流程:无需在多个软件间切换,从数据加载到融合分析到成果输出一气呵成
- 60+格式原生支持:无需格式转换即可直接加载多种数据类型
- 坐标系统自动识别:自动检测和对齐不同数据源的坐标系,避免手动配准
- 光谱分析深度集成:多光谱/高光谱影像可直接与点云融合,支持113种光谱指数的点云级计算
- 时序数据支持:支持加载多时相点云和栅格,对比分析变化趋势
▶1. 点云密度与点间距是什么?不同平台典型值是多少?
点云密度(Point Density) 指单位面积内的激光点数量,通常以 pts/m² 表示。点间距(Point Spacing) 指相邻激光点之间的平均距离。两者是衡量点云数据质量的基础指标。
不同采集平台的典型点密度:
| 采集平台 | 典型点密度 (pts/m²) | 典型点间距 (cm) | 适用场景 |
|---|---|---|---|
| 无人机LiDAR(UAV) | 50 - 500+ | 2 - 15 | 精细化地形测绘、矿山、电力线 |
| 机载LiDAR(ALS) | 1 - 50 | 15 - 100 | 大范围地形测绘、林业、城市规划 |
| 地基LiDAR(TLS) | 1000 - 10000+ | 0.1 - 3 | 建筑扫描、巷道测量、古建保护 |
| 背包/手持LiDAR | 500 - 5000 | 1 - 5 | 室内建模、地下空间、林下扫描 |
| 移动测绘(车载) | 100 - 2000 | 2 - 10 | 道路、街景、基础设施 |
点密度对处理结果的影响:
- 地面点分类:密度过低(<1 pts/m²)时难以区分低矮植被与地面
- DEM精度:点密度越高,DEM越精细,但计算量随之增大
- 单木分割:推荐≥4 pts/m²以获得可靠的冠层分割结果
- 建筑建模:推荐≥10 pts/m²以保证建筑边缘的清晰度
LiDAR360支持对过高密度点云进行抽稀,也支持对稀疏区域通过插值补充。
▶2. 地面点分类有哪些算法?精度如何?
LiDAR360提供三种地面点分类算法,适用于不同地形条件:
IPTD(改进的渐进加密三角网滤波):
- 核心算法,由Zhao et al.(2016)提出
- 原理:从局部最低点开始逐步构建TIN,通过迭代加密将满足条件的点加入地面
- 适用地形:平坦、缓坡、陡坡和丘陵均有良好表现
- 优势:在林区和城市复杂环境下精度高,LiDAR360的默认推荐算法
CSF(布料模拟滤波):
- 原理:将点云倒置,模拟一块"布料"从上方落下覆盖地形表面
- 适用地形:地形起伏明显的非城市区域
- 优势:参数少、运算快,对陡坡地形有一定优势
- 精度参考:较IPTD略低,适用于中等精度需求场景
深度学习地面分类:
- 基于预训练神经网络模型自动识别地面点
- 优势:对复杂场景有独特识别能力
分类精度影响因素:
- 点云密度:密度越高,地面与非地面点的区分度越好
- 地形复杂度:陡坡、断崖、密集建筑区增加误分类概率
- 植被覆盖度:浓密林区地面激光穿透率低,地面点稀疏
- 扫描角度:大扫描角边缘区域点密度降低,精度受影响
三种方法解决地面点稀疏:
1. 使用地面点分类工具时,取消勾选"当边长<时停止构建三角形"选项以允许更多点被分类为地面。
2. 对于非城市区域,尝试深度学习分类地面点以获得更好的检测效果。
3. 如果精度要求不高,可使用CSF(布料模拟滤波)地面滤波器作为替代算法。
▶3. DEM/DSM能达到什么精度?插值方法如何选择?
LiDAR360生成的DEM/DSM产品精度受原始点云质量、地面分类精度和插值方法共同影响。
注:高程精度与飞行高度、扫描仪精度、控制点布设等因素密切相关。
插值方法选择:
| 插值方法 | 原理 | 适用场景 | 特点 |
|---|---|---|---|
| IDW(反距离加权) | 根据距离权重插值,近点权重大 | 林区、植被覆盖区 | 平滑过渡,保持自然地形趋势 |
| TIN(不规则三角网) | 基于三角面片线性插值 | 城市、地形突变区域 | 保留尖锐地形特征,如路肩、建筑物边缘 |
| 无尖峰TIN | TIN的改进版,自动抑制异常值 | 含少量噪点的城市数据 | 避免孤立的尖峰/凹陷伪影 |
提高DEM质量的方法:
- 使用LiDAR360地形剖面编辑工具手动添加断裂线和地形修补
- 运行DEM精度分析工具,通过控制点验证高程误差并生成精度报告
- 对多时段数据处理时,保持一致的分辨率和插值方法以确保可比性
▶4. 单木分割有哪几种方法?
LiDAR360主要提供三种单木分割方法,适应不同林分类型和数据条件:
基于点云的单木分割(基于树干检测 — 深度学习):
- 原理:利用深度学习模型直接在三维点云中识别树干位置,再基于树干种子点聚类树冠点云
- 优势:不依赖CHM栅格化过程,保留了完整的三维结构信息;对多层林冠、茂密林分有更强的泛化能力
- 适用场景:TLS和ALS数据均可使用,尤其适合复杂林分结构和树干清晰的数据
- 可结合手动添加种子点辅助分割,满足小面积高精度需求
基于CHM的分割(冠层高度模型法):
- 原理:从CHM栅格中检测局部最大值作为树顶,再通过区域生长划定树冠边界
- 适用:针叶林、针阔混交林效果最佳,阔叶纯林次之
- CHM分辨率建议:0.3-1m(通常0.5-0.6m最佳,不超过冠幅宽度的1/3)
- 高斯Sigma参数:默认1.0,分割不足时减小(如0.5),过度分割时增大(如1.5)
基于影像的单木分割:
- 原理:利用高分辨率正射影像或多光谱影像,通过深度学习模型从二维影像中识别单木冠层轮廓
- 优势:仅用二维影像即可进行单木分割,与LiDAR点云分割结果交叉验证提高精度
- 适用场景:有高质量正射或多光谱影像覆盖的区域;可弥补点云密度不足区域的单木检测
▶5. 航带拼接的作用是什么?能达到什么配准精度?
航带拼接(Strip Adjustment) 的目的是校正机载/无人机LiDAR系统中激光扫描仪与GPS/IMU(惯性导航系统)之间的安置误差(Boresight Misalignment),使多条航带在重叠区域内精确对齐。
为什么需要航带拼接:
- 即使经过了高精度GPS/IMU解算,激光扫描仪与IMU之间的微小安装角误差(通常0.01°-0.1°量级)也会导致航带间产生系统性偏移
- 飞行高度越高,该误差放大越明显
- 未校正的航带错位直接影响后续DEM和分类精度
航带拼接方法:
| 方法 | 原理 | 适用场景 |
|---|---|---|
| 自动拼接 | 自动提取航带重叠区特征点,计算最优变换参数 | 地形起伏明显、有建筑物等明显特征 |
| 手动拼接 | 用户交互式选取同名点,引导解算 | 平坦地区或自动拼接效果不佳时 |
- 精度受飞行高度、IMU精度、重叠区特征丰富度等因素影响
LiDAR360的航带拼接模块支持实时预览结果,可反复调整参数直至航带对齐满意。
▶6. 坐标系与高程基准怎么选?
地理坐标系 vs 投影坐标系:
- 地理坐标系(GCS):以经纬度表示位置(度为单位),适合大范围数据管理和发布
- 投影坐标系(PCS):以平面坐标表示位置(米为单位),适合精确量测和分析
- 建议:LiDAR360中做量测、计算时使用投影坐标;数据交换时注意EPSG编码
常用的中国地区坐标系:
| 坐标系 | EPSG | 说明 |
|---|---|---|
| CGCS2000(2000国家大地坐标系) | 4490(地理)/ 4547等(投影) | 中国现行法定坐标系 |
| WGS84 | 4326 | GPS使用的全球坐标系 |
| CGCS2000 3° GK分带 | 4547-4560 | 大比例尺测图(≥1:1万) |
| CGCS2000 6° GK分带 | 4508-4520 | 中小比例尺测图(<1:1万) |
| UTM | 32648-32652(北半球) | 国际通用投影 |
高程基准:
| 高程类型 | 定义 | 说明 |
|---|---|---|
| 椭球高(Ellipsoidal Height) | 相对于参考椭球面的高度 | GPS/RTK直接测量值 |
| 大地水准面高(Orthometric Height) | 相对于大地水准面的高度,即海拔 | 需要大地水准面模型转换 |
| 大地高 = 正常高 + 高程异常 | Geoid模型(如EGM2008、中国似大地水准面模型)提供转换参数 |
注意:DJI无人机LiDAR数据默认输出椭球高,若需海拔需用大地水准面模型转换。
▶7. 体积计算精度受哪些因素影响?
LiDAR360矿山模块的堆体/挖填方体积计算精度受以下因素综合影响:
关键影响因素:
| 因素 | 影响方式 | 优化建议 |
|---|---|---|
| 点云密度 | 密度越低,体积表面拟合误差越大 | 堆体区域点密度≥50 pts/m² |
| 地面分类精度 | 地面参考面误差直接传递到体积结果 | 人工检查地面分类质量后再计算 |
| 参考面/基准面选择 | 基准面高程误差导致系统性体积偏差 | 使用DEM或多期数据的稳定区域定义基准面 |
| 堆体边界定义 | 边界过小遗漏边缘、边界过大包含无关区域 | 精确绘制或自动提取堆体边界 |
| 遮挡和扫描盲区 | 堆体底部、陡峭边坡等区域可能存在数据缺失 | 多角度扫描补充,或通过插值填补 |
| 配准误差 | 多期数据间即使几厘米的配准偏差也会造成显著体积误差 | 确保各期数据统一坐标系并经过航带平差 |
- 变化检测(两期差值):对配准精度高度敏感,建议配准精度优于3cm后再做体积变化分析
▶8. 建筑模型的LOD等级是什么?LiDAR360支持到哪个级别?
LOD(Level of Detail/Development) 是三维建筑模型的精细度等级标准:
| LOD等级 | 几何复杂度 | 典型内容 | 适用场景 |
|---|---|---|---|
| LOD0 | 二维基底 | 建筑底面多边形 | 城市规划总图 |
| LOD1 | 体块模型 | 平面拉伸的方块体,平屋顶 | 城市体量分析、日照分析 |
| LOD2 | 屋顶模型 | 带屋顶结构(人字顶/四坡顶等)的三维模型 | 城市规划、噪声模拟、三维地籍 |
| LOD3 | 精细建筑模型 | 含门窗、阳台、立面细节 | 建筑审批、精细可视化 |
| LOD4 | 室内模型 | 含室内房间、楼梯等内部结构 | BIM、室内导航 |
LiDAR360的建筑建模能力:
- 按CityGML标准来看,LiDAR360可以自动构建LOD2.2精度级别的建筑模型。LOD2.2级别的模型能够表达出建筑物屋顶的细节,墙壁则表现为竖直拉伸的平面,该级别模型的精度也是机载激光雷达能达到的最大精度。
- 支持人字顶、四坡顶、平顶等多种屋顶类型的自动识别和重建
- 基于二维底图的建模保留拓扑结构,相邻建筑无缝拼接
- 提供曲面编辑和边缘编辑工具用于模型细化
- 支持纹理映射和材质编辑,增强可视化效果
自动LOD2建模的几何精度取决于点云密度:无人机数据(50+ pts/m²)可达到10-20cm的平面精度。
▶9. LiDAR360处理的点云数据单位是什么?
LiDAR360 V5.2之后支持用户自定义单位设置。可通过窗口右上角 显示设置 > 测量设置,进行自定义单位设置,目前支持的单位有:
- 米(m)
- 英尺(ft)
- 分米(dm)
- 厘米(cm)
- 毫米(mm)
- 英寸(in)
▶1. LiDAR360 如何用于地形测绘?可以生成哪些成果?
LiDAR360 可端到端完成地形测绘全流程,从原始点云生成多种标准地形产品和专业报告。主要工作流和可交付成果包括:
1. 数据预处理:点云格式转换、坐标投影和去噪
2. 地面分类:多种算法在复杂地形下提取地面点
3. DEM生成:多种插值方法生成数字高程模型
4. 等高线生成:从DEM或直接从点云生成,等高线可自定义配置
5. 断面分析:生成横断面和纵断面并进行分析生产专业断面报告
6. 山体阴影、坡度、坡向、粗糙度等:派生的多种地形产品
7. 水淹分析、排水线分析、填洼、流向等:派生的多种水文产品
8. 导出:栅格为GeoTIFF,矢量为DXF/SHP,点为CSV,报告为HTML/PDF
地形模块融合点云和影像生成真正射影像等摄影测量产品。
▶2. LiDAR360 在林业调查和森林资源监测中能做什么?
LiDAR360 在林业调查和森林资源监测中支持从单木到林分尺度的全链条分析:
- 树木属性:位置、树高、冠幅直径、冠幅面积、胸径、枝下高等
- 提取森林指标:高度分位数、叶面积指数、郁闭度、间隙分数、强度分位数等
- 回归分析:线性回归、支持向量机、快速人工神经网络、随机森林
- 林分分析:自动快速自定义森林资源调查或间伐抚育等方案
- 立木材积:树干检测和枝下高提取,并计算树干分段和树干材积等
- 单木编辑:树木属性拟合测量、手动编辑修改以及树种标注
- 单木报告和林分报告:一键生成专业化单木报告和林分分析报告
碳监测:通过回归模型将样地测量值与LiDAR衍生指标结合,估算整个研究区域的生物量、蓄积量和碳储量。
▶3. LiDAR360 可以提取哪些单木属性和林分参数?
LiDAR360可提取丰富的单木属性和林分级别参数:
| 属性 | 属性 |
|---|---|
| 树木位置(X, Y,Z) | 南北冠径 |
| 树高 | 东西冠径 |
| 冠幅直径 | 冠幅体积 |
| 冠幅面积 | 海拔 |
| 枝下高(CBH) | 树干体积 |
| 胸径(DBH) | 树干弯曲度 |
| 叶面积指数(LAI) | 树干分段 |
| 郁闭度 | 蓄积量 |
| 间隙率 | 冠高 |
| 生物量 | 孔隙率 |
| 高径比 | 方位角,距离 |
| 冠高比 | 是否分叉 |
| 树冠轮廓 | 坡度 |
| 树冠偏冠 | 强度变量 |
▶4. LiDAR360 如何用于矿山测量、体积计算和边坡分析?
LiDAR360矿山模块为矿山测量提供从体积计算、边坡分析到巷道建模的完整工具链:
体积计算:
- 堆体体积测量
- 挖填方分析
- 封闭模型体积计算
- 两次测量之间的体积变化分析
边坡分析:
- 自动提取坡顶坡底
- 坡度角计算
- 地形稳定性评估
- 边坡合规性检测及报告输出
巷道建模及分析报告:
- 从点云数据构建井下巷道三维模型
- 断面分析并生成专业报告
- 变形监测并生成变形图和报告
▶5. LiDAR360 如何用于地质灾害监测与风险评估?
LiDAR360通过高精度地形分析和多时相变化检测,为地质灾害监测与风险评估提供关键技术支撑:
- 地形特征提取:从高分辨率点云中识别断层、节理和层理面等地质结构
- 结构面分析:测量地质面的倾角、倾向和方位
- 变化检测:通过比较多时相数据集监测滑坡、岩崩和侵蚀
- DEM分析:生成坡度、坡向和粗糙度图用于滑坡敏感性评估
▶6. LiDAR360 支持实景三维重建和数字孪生应用吗?
可以。LiDAR360从三维数据采集、自动建模到多源融合,为实景三维重建和数字孪生应用提供全流程支持:
三维建筑建模:
- 从机载点云自动构建LOD2级别三维建筑模型
- 基于二维底图的建模保留拓扑结构
- 曲面编辑和边缘编辑工具用于模型精修
多源融合:
- 结合点云、影像和矢量数据进行综合三维场景重建
- 导入融合多种数据类型进行可视化和分析
模型导出:
- 导出LiModel格式三维模型
- 转换为其他格式用于数字孪生平台
影像(Photo模块):
- 从重叠的下视和倾斜影像进行三维重建
- 真正射影像生成
- 从影像生成密集点云
▶7. LiDAR360 如何进行多光谱和高光谱遥感分析?
LiDAR360的光谱模块集成了从指数计算、影像分类到点云光谱融合的完整多光谱/高光谱分析能力:
光谱指数计算:
- 113种内置光谱指数,用于植被、水体、地质、建筑区和火烧评估
- 自定义波段数学公式用于用户定义指数
- 大面积批处理指数生成
光谱分类:
- 使用USGS光谱库V7.0参考光谱或自定义光谱数据的光谱角分类(SAM)
- 多类别光谱分类用于矿物填图和土地覆盖识别
光谱预处理:
- MNF(最小噪声分离)旋转用于高光谱数据降噪
- PCA(主成分分析)用于降维
- Savitzky-Golay滤波用于光谱曲线平滑
点云光谱融合:
- 将多光谱影像的光谱信息映射到LiDAR点云
- 结合三维结构与光谱特征的联合空间-光谱分析
- 使用光谱波段组合的彩色点云显示
常见应用:
- 植被健康和胁迫监测(NDVI、EVI、NDWI)
- 地质勘探的矿物和岩性填图
- 火烧严重程度评估(NBR)
- 水体和湿地制图
- 城市土地覆盖分类
▶8. LiDAR360 如何高效处理大规模点云数据?
LiDAR360针对大规模点云数据设计了多层次的高效处理方案,涵盖批处理、分布式计算和可视化自动化工作流三个方面:
批处理:
- 批处理工具:在多个数据集上自动运行相同操作
- 批处理特别适用于多瓦片或重复处理任务的大面积项目
分布式计算:
- 分布式命令行操作:跨多台机器脚本化和执行处理
- Model Builder集成:自定义工作流模型的分布式执行
- 并发许可:多用户、多机器环境的集团授权
- 此能力对处理TB级LiDAR数据或跨多个数据集运行计算密集型AI模型特别有价值
Model Builder自动化工作流:
- 200+模块:访问全系列LiDAR360处理功能作为构建块
- 可视化工作流设计:拖拽界面链接处理步骤
- 参数配置:为工作流中每个步骤预设参数
- 可复用工作流:保存和共享工作流,实现一致、可重复的处理
- 批量执行:将工作流自动应用于多个数据集
Model Builder适用于标准化团队生产工作流、自动化重复性多步骤处理任务,以及构建针对特定行业应用的自定义处理管道。
▶9. 如何进行数据质量检查、设备精度校核与精度优化?
LiDAR360提供覆盖数据采集验收、设备检校到成果精度优化的全流程质量控制工具,所有检查结果均可导出为 HTML 报告或 SHP 矢量文件。
一、数据质量检查
密度质量检查:
- 对点云数据按网格统计单位面积内的激光点数量,默认 4 个密度等级,用户可自定义密度阈值,识别数据覆盖空洞和稀疏区域。
- 网格大小默认 2m,密度阈值区间可按需增减,输出 HTML 报告以不同颜色标记各等级网格。
重叠度检查:
- 分析相邻航带或区块间点云的重叠率,适用于多航带或多架次数据的覆盖完整性验证。
- 默认合格阈值为 25%,低于阈值的区域输出为 SHP 文件和 HTML 统计报告。
高差质量检查:
- 分析两个点云数据集之间的高程差异,适用于多期数据对比或航带间高程偏差检测。
- 默认采样间隔 0.5m,输出高差分布 HTML 报告。
二、设备精度校核
航线质量检查:
- 基于 POS 轨迹数据(*.pos 或 *.out),对飞行航线质量进行全面分析,包括对飞行中的航线质量进行检查分析,包括航高分析、速度分析和飞行姿态分析
- 可设置偏差百分比阈值(如 5%),超出阈值的航线标记为不合格,输出航线质量 HTML 报告。
检校记录:
- 记录每次设备检校的参数、时间和结果,建立完整的检校历史档案。
- 支持导入和导出检校参数文件,便于设备状态的持续跟踪和对比分析。
- 检校记录可用于评估设备长期稳定性,预判传感器性能衰减趋势。
精度检查:
- 将点云数据与控制点进行三维空间对比,计算 X/Y/Z 各方向偏差(Dx、Dy、Dz)和平面偏差(Dxy)。
- 支持导入 ASCII 格式控制点文件(X, Y, Z)和 KML/KMZ 控制点范围文件,在三维视图和剖面视图中交互查看偏差分布。
- 生成控制点精度统计报告,包括各方向中误差(RMSE)和最大偏差,按区域汇总精度评估结果。
三、设备精度校核与优化
数据配准:
- 支持点云与点云、点云与模型之间的精确配准,将不同来源、不同坐标系的数据统一到同一参考框架下。
- 提供 ICP(迭代最近点)精配准算法,通过迭代优化最小化两个点集之间的距离误差。适用于局部精细配准,需要两个数据已有较好的初始位置。
- 提供基于控制点或同名特征的手动配准方式,用户交互式选取对应点对,解算空间变换矩阵,适用于缺乏初始位置信息的大偏差场景。
- 支持自定义用户坐标系(UCS),可基于剖面视图辅助选取配准参考面,提高配准精度和效率。
安置:
- 安置误差(Boresight Misalignment)指激光扫描仪与 GPS/IMU 惯性导航系统之间的安装角度偏差,是LiDAR数据系统误差的主要来源。
- 即使经过高精度 GPS/IMU 解算,微小的安置角误差(通常 0.01°-0.1° 量级)也会在航带重叠区产生系统性偏移,飞行高度越高误差放大越明显。
- 安置参数包括三个旋转角(Roll、Pitch、Heading)和三个平移量(X、Y、Z),推荐初始值控制在位置偏差约 0.05m、角度偏差约 5° 以内以获得较好的优化效果。
航带平差:
- 通过分析航带重叠区点云差异,迭代优化安置参数(Roll/Pitch/Heading),使多条航带在重叠区域内精确对齐。
- 基于 Zhang et al.(2010)的逐步几何法和 Glira et al.(2015, 2016, 2019)的 ICP 变体与混合定向算法理论,支持自动和手动两种平差模式。
- 自动平差由算法自动提取航带重叠区特征点,计算最优变换参数;手动平差由用户交互式选取同名点辅助解算,适用于平坦地区或自动效果不佳的场景。
- 实时预览平差结果,可反复调整参数直至航带间偏差最小化,校正后的点云可直接用于后续 DEM 生成和分类处理。
精度优化要点:
- 控制点应均匀分布在测区范围内,建议每平方公里不少于 3 个控制点。
- 对于大高差测区,建议使用七参数转换模型进行坐标投影优化。
- DJI L1/L2 数据可内置运行 ICP 精度优化算法,支持点云平滑、赋色和距离滤波,输出 LAS/PLY/PNTS/PCD/S3MB 等格式。
▶10. LiDAR360在工程测量中有哪些应用?
LiDAR360支持多种工程测量场景,提供从数据采集到成果交付的完整链路:
土方与填挖方测量:
- 基于点云的精确挖填方体积计算,支持定义基准面或多期数据对比
- 自动生成土方报告,输出挖方、填方、重量和净方量等信息
- 适用于码头、料堆、场地平整、路基施工、基坑开挖等工程场景
断面测量与成图:
- 沿任意方向生成横断面和纵断面,自动提取断面详细信息
- 支持断面图批量导出,用于道路设计、河道整治、隧道工程和电力线布设等
- 断面报告支持自定义模板,可一键导出为HTML/PDF
多期对比分析与施工偏差分析:
- 将设计模型与实测点云叠加对比,生成对比报告
- 通过多期点云对比,检测地表沉降、边坡位移和结构形变
- 支持生成施工偏差分析报告,量化各区域偏差统计
控制测量辅助:
- 导入控制点坐标,辅助点云绝对定位和坐标转换
- 支持靶标自动识别和中心坐标提取
▶11. LiDAR360如何进行正射影像(DOM)生产?
LiDAR360的Photo模块支持从航空/无人机影像生成高质量数字正射影像(DOM):
影像数据准备:
- 支持导入无人机下视和倾斜影像,兼容JPEG、TIFF等常见格式
- 支持导入POS数据(*.pos、*.out)用于影像外方位元素初始化
- 支持导入地面控制点提高定位精度
空三解算与三维重建:
- 自动特征点提取和匹配,进行空中三角测量解算
- 生成稀疏点云和密集点云,构建三维场景
- 支持控制点平差优化,提高空三解算精度
正射校正与镶嵌:
- 基于DEM/DSM对影像进行逐像素的正射校正,消除投影差
- 多幅正射影像自动匀色和羽化镶嵌,消除拼接缝
- 支持建筑区真正射影像(True Ortho)生产,消除建筑物倾斜和遮挡
成果输出:
- 正射影像导出为GeoTIFF格式,包含完整的地理参考信息
- 支持自定义输出分辨率和裁切范围
- 正射影像可作为底图导入LiDAR360,与点云融合进行彩色显示和分类
▶1. LiDAR360 AI分类能检测什么?
LiDAR360 AI分类提供26个分类类别,包括:
| 类别 | 类别 |
|---|---|
| 噪点 | 道路 |
| 地面点 | 广告牌点 |
| 低植被点 | 护栏点 |
| 高植被点 | 静止车辆点 |
| 建筑点 | 移动车辆点 |
| 低点 | 树干点 |
| 模型关键点 | 枝叶点 |
| 水体点 | 屋顶点 |
| 车辆点 | 墙壁点 |
| 路灯点 | 杆状物点 |
| 重叠区域点 | 电力线点 |
| 线缆点 | 杆塔点 |
| 巷道壁点 | 杂物点 |
AI模型在多样化LiDAR数据集上预训练,可直接应用于新数据无需额外训练。针对特定领域需求,用户可训练自定义模型(参见问题2)。
▶2. 用户能在LiDAR360中训练自定义AI模型吗?
可以。LiDAR360支持自定义深度学习模型训练:
1. 分类 > 深度学习分类:使用内置深度学习模型进行常见类别分类(地面、植被、建筑等)
2. 分类 > 自定义深度学习分类:在自有标注数据上训练模型,用于特定领域分类任务
3. 机器学习分类:使用经典ML方法(随机森林、SVM等),通过用户定义的训练样本进行分类
深度学习分类需要GPU和最新驱动程序。确保NVIDIA驱动为最新版本,并配置系统使用独立GPU。
如果机器学习分类未达到预期效果,请尝试:
- 确保训练样本标签准确
- 增加训练样本与测试数据的重叠度
- 测试多种算法选项,找到最适合数据的算法
▶3. LiDAR360 AI助手能帮助什么?
AI助手在LiDAR360内提供自然语言交互,使用户能够:
- 导航功能:询问"如何生成DEM?",助手会引导您找到正确的工具
- 排除问题:描述问题(如"为什么等高线断裂?")并获取诊断指导
- 最佳实践:获取针对特定项目类型的工作流建议
- 访问文档:通过对话直接查询知识库
▶1. LiDAR360提供哪些光谱分析功能?
LiDAR360光谱模块为多光谱和高光谱影像提供全面的光谱分析工具,包括:
- 113种内置光谱指数,涵盖植被、水体、地质、建筑区、火烧区和矿物识别
- 自定义指数计算,使用波段数学公式
- 光谱角分类(SAM),用于基于光谱特征的地物识别
- MNF(最小噪声分离)和PCA(主成分分析)降维
- Savitzky-Golay滤波,用于光谱曲线平滑
- 点云光谱映射,将影像光谱信息融合到LiDAR点云
- USGS光谱库V7.0集成,用于矿物和材料识别
- 自定义光谱数据导入,用于特定领域的参考光谱
- 基于ROI的光谱提取,用于感兴趣区域的定向分析
光谱模块通过融合LiDAR三维结构与多光谱/高光谱传感器的光谱信息,实现联合空间-光谱分析。
▶2. LiDAR360支持哪些光谱指数?
LiDAR360支持113种内置光谱指数,按以下类别组织:
植被指数:
NDVI、NDWI、SAVI、EVI、ARVI、GNDVI、GCI、GDVI、GLI、GRVI、GSAVI、GVI、GARI、GEMI、IPVI、LAI、LCI、MCARI、MCARI2、MNLI、MRENDVI、MRESR、MSR、MSAVI2、MTVI、MTVI2、MONI、NLI、DVI、RDVI、RVI、TVI、VARI等
水体和湿度指数:
NDWI、MNDWI、DWSI、LWVI1、LWVI2、MSI、WBI(Water Band Index)、NDII、NDLI
建筑和火烧指数:
NDBI、NBR、NBRT1、BAI(Burn Area Index)、IOR
地质和矿物指数:
明矾石指数(ALUI)、方解石指数(CALI)、碳酸盐指数(CARI)、粘土蚀变指数、粘土矿物比值、白云石指数(DOLI)、绿帘石/绿泥石/闪石指数(ECAI)、铁离子蚀变指数(FEAI)、亚铁指数(FEI、FESI)、亚铁矿物比值(FMR)、铁硅酸盐指数、羟基矿物指数(OHI1、OHI2、OHI3)、铁氧化物比值、高岭石指数(KAI1、KAI2、KAI3)、红土指数(LATI)、菱镁矿指数(MAGI)、MgOH-碳酸盐丰度指数(MGAI)
其他指数:
花青素反射指数(ARI1、ARI2)、类胡萝卜素反射指数(CRI1、CRI2)、纤维素吸收指数(CAI)、病害水分胁迫指数、森林覆盖指数(FCI1、FCI2)、叶绿素指数(LCI)、木质素-纤维素吸收指数(LCAI)、红边指数(RENDVI、RESI)、WorldView专属指数(WV-SI、WV-WI)等
完整指数库支持多种传感器类型,包括Landsat TM/ETM+、Sentinel-2、WorldView-2/3和用户自定义波长波段的通用多光谱传感器。
▶3. 如何从多光谱影像计算光谱指数?
在LiDAR360中计算光谱指数:
1. 点击"光谱 > 光谱指数计算"
2. 选择输入多光谱影像文件(*.tif格式)
3. 从内置库中选择所需光谱指数(如NDVI、NDWI、SAVI)
4. 配置波段分配以匹配影像波长
5. 可选定义ROI(感兴趣区域)限定计算范围
6. 设置输出路径并运行计算
7. 结果导出为单波段GeoTIFF栅格
对于内置库中没有的自定义指数,使用波段数学公式编辑器定义表达式(如 ("Band4@" - "Band3@") / ("Band4@" + "Band3@"))。
常用指数工作流:
| 指数 | 公式 | 典型应用 |
|---|---|---|
| NDVI | (NIR - Red) / (NIR + Red) | 植被健康和覆盖度 |
| NDWI | (Green - NIR) / (Green + NIR) | 水体检测 |
| NDBI | (SWIR - NIR) / (SWIR + NIR) | 建筑区制图 |
| NBR | (NIR - SWIR) / (NIR + SWIR) | 火烧严重程度评估 |
| SAVI | ((NIR - Red) / (NIR + Red + L)) * (1 + L) | 稀疏冠层区域植被 |
▶4. 如何将光谱信息映射到点云数据上?
点云光谱映射将多光谱影像的光谱信息与LiDAR点云数据融合,为每个三维点赋予光谱值:
1. 点击"光谱 > 点云光谱映射"
2. 加载目标点云数据
3. 加载覆盖同一区域的多光谱影像
4. 配置映射参数
5. 运行映射过程
映射后每个点携光谱波段值作为标量场,支持:
- 使用光谱波段组合的彩色点云显示
- 直接在点云上计算光谱指数
- 结合三维结构与光谱特征的联合空间-光谱分类
- 关联LiDAR冠层结构与光谱植被指数的增强植被分析
▶5. 高光谱数据有哪些降维方法?
LiDAR360提供两种高光谱影像降维方法:
MNF(最小噪声分离)
- 光谱 > MNF旋转
- 通过两次级联PCA变换将高光谱数据中的噪声与信号分离
- 输出波段按信噪比递减排序,噪声集中在高阶波段
- 参数包括输出维度数和处理范围
PCA(主成分分析)
- 光谱 > 主成分分析
- 将相关光谱波段转换为一组线性不相关的主成分
- 前几个成分通常捕获大部分数据方差
- 参数包括X/Y分量范围和输出波段选择
两种方法都适用于:
- 减少数据量同时保留关键光谱信息
- 分类或指数计算前的预处理
- 可视化数据中的主导光谱模式
▶6. LiDAR360能使用USGS光谱库吗?
可以。LiDAR360集成USGS光谱库V7.0(USGS V7.0),包含数百种矿物、岩石、土壤、植被和人造材料在可见光至短波红外波长范围的实验室测量反射光谱。
参考文献:Kokaly, R.F., Clark, R.N., Swayze, G.A., Livo, K.E., Hoefen, T.M., Pearson, N.C., Wise, R.A., Benzel, W.M., Lowers, H.A., Driscoll, R.L., and Klein, A.J., 2017, USGS Spectral Library Version 7: U.S. Geological Survey Data Series 1035, 61 p.
应用包括:
- 矿物识别:将影像光谱与已知矿物参考光谱匹配
- SAM分类:使用USGS光谱作为参考端元
- 岩性填图:从高光谱影像识别地表矿物组成
▶7. 用户可以导入自定义光谱数据吗?
可以。LiDAR360支持导入自定义光谱数据用于特定领域分析:
1. 点击"光谱 > 自定义光谱数据"
2. 从外部来源导入光谱曲线(实验室测量、野外光谱仪数据或已发布的光谱数据库)
3. 在SAM分类中使用自定义光谱作为参考端元
4. 将野外测量光谱与影像衍生光谱进行对比验证
这使用户能够构建针对其研究区域和目标材料的应用特定光谱库。
▶8. 光谱分析支持哪些数据格式?
输入格式:
- 多光谱/高光谱影像:GeoTIFF(*.tif)
- ENVI格式:ENVI头文件和数据文件(*.hdr、*.dat)
- ROI定义:Shapefile(*.shp)、GeoPackage(*.gpkg)、ENVI XML(*.xml)
输出格式:
- 光谱指数栅格:GeoTIFF(*.tif)
- 分类结果:GeoTIFF(*.tif)
- 变换影像(MNF、PCA):GeoTIFF(*.tif)
- 光谱曲线:CSV(*.csv)
▶9. LiDAR360光谱模块的典型应用有哪些?
光谱模块支持广泛的遥感应用:
农业和林业:
- 使用NDVI、EVI等植被指数进行作物健康监测
- 森林胁迫检测和树种区分
- 冠层含水量估算
水资源:
- 使用NDWI和MNDWI进行水体检测和制图
- 湿地划定和监测
- 水质指标制图
地质和矿山:
- 矿物填图和岩性分类
- 热液蚀变带识别
- 使用光谱特征进行矿物勘探
城市和建筑环境:
- 使用NDBI进行建筑区提取
- 城市热岛分析
- 不透水面制图
环境监测:
- 使用NBR进行火烧严重程度评估
- 使用多波段干旱指数进行干旱监测
- 土地覆盖和土地利用分类
LiDAR-光谱联合分析:
- 利用冠层结构+光谱特征进行树种级森林分类
- 结合三维地形背景的地质特征制图
- 融合三维结构与光谱信息的增强土地覆盖分类
▶1. LiDAR360如何申请试用?
LiDAR360为每个大版本提供7天免费试用。
1.申请试用请访问“数字绿土”官网 www.lidar360.com,导航至 软件产品 > LiDAR360 > 试用申请,填写试用申请表,工作人员将把软件安装包和激活码发送到您的邮箱。
2.请关注”数字绿土“公众号,在“数字绿土”公众号,单击下方工具栏“线上互动”,单击“软件试用”,填写试用申请表,工作人员将把软件安装包和激活码发送到您的邮箱。
▶2. LiDAR360试用期支持哪些功能?
| 模块 | 免费版本 | 全功能版本 |
|---|---|---|
| 数据可视化 | √ | √ |
| 海量数据支持 | √ | √ |
| 数据管理 | 申请7天免费试用 | √ |
| 预处理 | 申请7天免费试用 | √ |
| UAV精度质检 | × | √ |
| 分布式 | × | √ |
| 统计 | 申请7天免费试用 | √ |
| 分类 | 申请7天免费试用 | √ |
| 地形 | 申请7天免费试用 | √ |
| 矢量编辑 | 申请7天免费试用 | √ |
| 机载林业 | 申请7天免费试用 | √ |
| 地基林业 | 申请7天免费试用 | √ |
| 矿山 | 申请7天免费试用 | √ |
| 建筑建模 | 申请7天免费试用 | √ |
| 影像 | 申请7天免费试用 | √ |
| 光谱 | 申请7天免费试用 | √ |
| 地质 | 申请7天免费试用 | √ |
▶3. LiDAR360试用期结束后会发生什么?
试用期结束后,LiDAR360进入精简模式。核心可视化功能仍然可用,包括:
- 数据查看和导航
- 测量工具
- 选择工具
完整的模块功能(地形、林业、分类、矿山等)需要购买许可证。联系 info@lidar360.com 获取购买信息。
▶4. 如何激活LiDAR360?
有两种许可方式:加密狗(硬件USB密钥)和授权码(软授权)。
加密狗
将加密狗插入USB端口,软件自动激活。请勿格式化、删除或复制加密狗上的文件。
授权码(软授权)
步骤一 — 发送激活信息:
点击"文件 > 激活License",或双击安装目录中的 License Manager.exe。
- 填写姓名(必填)
- 填写公司(必填)
- 选择要激活的模块
- 点击复制
- 将复制的内容通过邮件发送至 info@lidar360.com
步骤二 — 激活许可证:
收到授权码后:
- 在线激活:输入授权密钥,选择"在线",点击"激活"
- 离线激活:输入授权密钥,选择"离线",生成请求文件(.req),在授权门户上传,下载升级文件(.upd),在License Manager中应用
集团授权(并发使用)
在局域网服务器上安装集团授权服务工具,局域网内用户在许可证激活页面输入服务器IP地址(默认端口8273)获取浮动许可证。
▶5. 如何将许可证转移到另一台电脑?
将许可证密钥从一台电脑转移到另一台:
1. 先在当前电脑上迁出许可证(通过License Manager在线或离线迁出)
2. 在新电脑上激活相同的密钥
如果原电脑损坏无法迁出,请将授权码发送至 info@lidar360.com,许可证将从服务器端撤销,然后可在另一台电脑上使用。
▶6. 新版本激活的许可证可以在旧版本中使用吗?
不可以。较新的大版本(如V9.x)使用更新的许可证管理器,旧版本无法自动识别。
未找到匹配的问题。
请尝试其他搜索词。